Finals!
Even though we had little testing time due to the weather conditions we still were able to reserve a place in the finals. This is very exciting because this is the very first time that a team from The Netherlands is participating! Because we won during the 'static judging' we were allowed to pick the time slots for the finals first. We opted to have the latest slots available beginning at course Alpha and ending at course Charlie. We chose this order due to the wind directions and generated lee from the edges of the lake. In the morning we were still fixing the router problem (it fried the day before due to the extreme weather) and some software bugs. Unfortunately the esc somehow stopped working during the first heat. We immediately pulled the Trident from the water and started troubleshooting, again. In the end we disassembled the entire boat down to the bottom of the hull and we fixed the problem.
Only one heat left to score our points. This is it! It started out great. The Trident did what it was supposed to do and we were receiving all the feedback we were expecting. The Trident was seeing and identifying the obstacles and was in the correct state. Unfortunately, halfway during the heat the Trident started spinning in circles. We weren't sure why it was doing it, but after a while we figured out that the heading was off. Somehow the driver that provided the heading information wasn't updating like we expected. We tried a cable reset but this didn't fix the problem.
In the end we still have managed to score enough points to place fifth! After a year of intense programming and working on the Trident it all suddenly was done. We finally had a moment to just sit and think back to this amazing year. The only thing left to do is to go to the party that the Roboboat competition set up in the evening next to the beach. Daryl spoke to every team and handed out the awards. We said goodbye to all the Roboboat teams and to everyone from Robonation and headed back home.




Florida weather
Florida weather is something else. It was 32ºC with the sun out and it changed to massive thunderstorms within 10 minutes. During lunch a lightning bolt hit de network cable just outside the tent and destroyed the network equipment from the competition. The heats are cancelled and unfortunately we are sent home. We must have our testing time but unfortunately there is nothing you can do about the weather. Fortunately the storm did go away at 9pm, so we could test in the pool again. This is not ideal because we need the real environment with real sensor data.
The next morning was the hottest and most humid so far. It's was not only for us unbearable but also for the Trident. Our network equipment fried and we spent the morning going about creating an alternative which took too long. At 1:15PM we were scheduled for our static judging. This means that we must give a presentation to 15 judges who will inspect the Trident and ask questions. We not only be scored on our presentation design, but also on craftsmanship, the website, and uniform. The judges were very interested in our design and they seemed impressed. At 6:00PM the result were in and we are happy to announce that we got first place with 324 points. We are leading the competition and this gives us a reassuring feeling for the coming days when the actual heats start where you can score points. During the presentation another storm snuck up on us. We need the valuable testing time!







Reed Canal Park
So, Monday morning. The start of the competition week. We got breakfast and the thing to know is that everything is big here in Florida! Option paralysis is a real deal when getting cereal.
We weren't aloud to get water time in the lake yet but we did manage to get some images from the buoys to do software tests with. Later on during the day when we got back we were very tired and of course immediately started testing in the pool. This was mainly a check to see if we could get all the systems up and running and to see if it was capable in the hot Florida weather. We quickly found out that our manual take-over antenna was too deep down in the boat, so the first modification was already made within a couple of hours. It worked so it was time to get some sleep and get ready for day 2.
The first thing we had to do was to check in at the team orientation meeting. This is were we got our ID's, got a safety briefing and selected our first time-slot for testing at Reed Canal Park. This is the venue where the competition will be held and where we will be spending most of our time. We were one of the first to get water time and in total we did two runs. These runs were mainly to get as much data as we could so that we can review it throughout the day. We haven't done an autonomous run yet, but that will come the following days.







Arrival in Florida
We saw the flight as valuable time to continue working of the software. So we layed down an internet cable across the aisle on the plane to exchange updates of our software. Upon arrival the customs officers were very interested with our Trident but eventually we were allowed into Florida!
We picked up our car, loaded the Trident and had a small road trip to the Embry-Riddle Aeronautical University were we will be staying in a classic USA style dormitory. We first headed to Reed Canal Park where the Roboboat competition will be held and where we could pick up our LiPo because it isn't allowed on the plane. There, we met with the very friendly crew from Roboboat and they gave us a quick tour around the lake. We were quite hungry and they gave us a good tip where to get the best hot wings in town, and hot they were! We quickly bought breakfast from a gigantic Walmart that never closes and went to sleep.
The next morning we got coffee from Dunkin' Donuts, ate breakfast and immediately we started calibrating the Trident and conducted a couple of tests right in our dormitory hallway. From Monday evening we are allowed to start testing in the pool from the university. Our view is also pretty good because right in our backyard is a small airstrip and a Nascar race track!




We are ready to go!
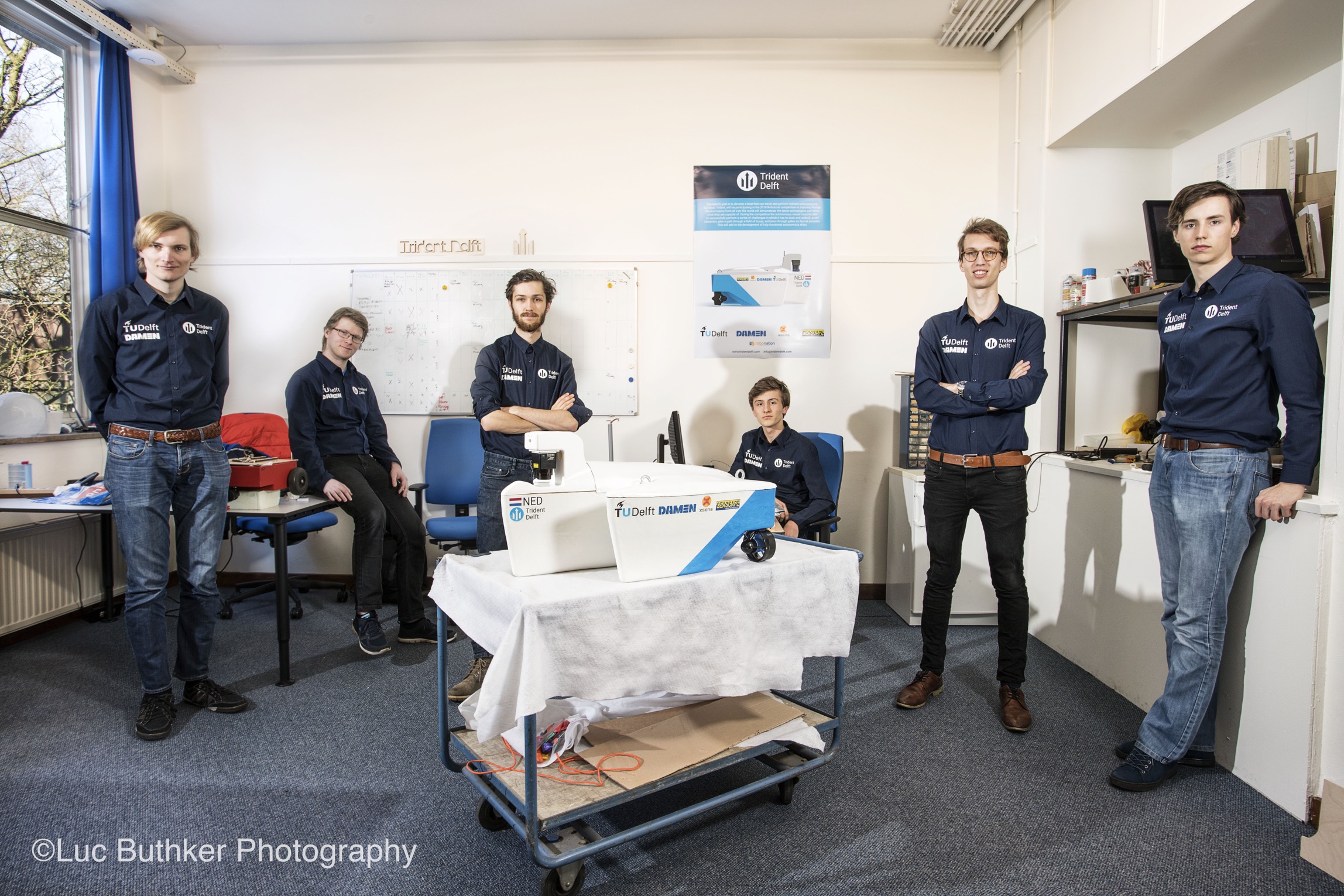
Check, double check, check again. We are ready to go!


Final Design
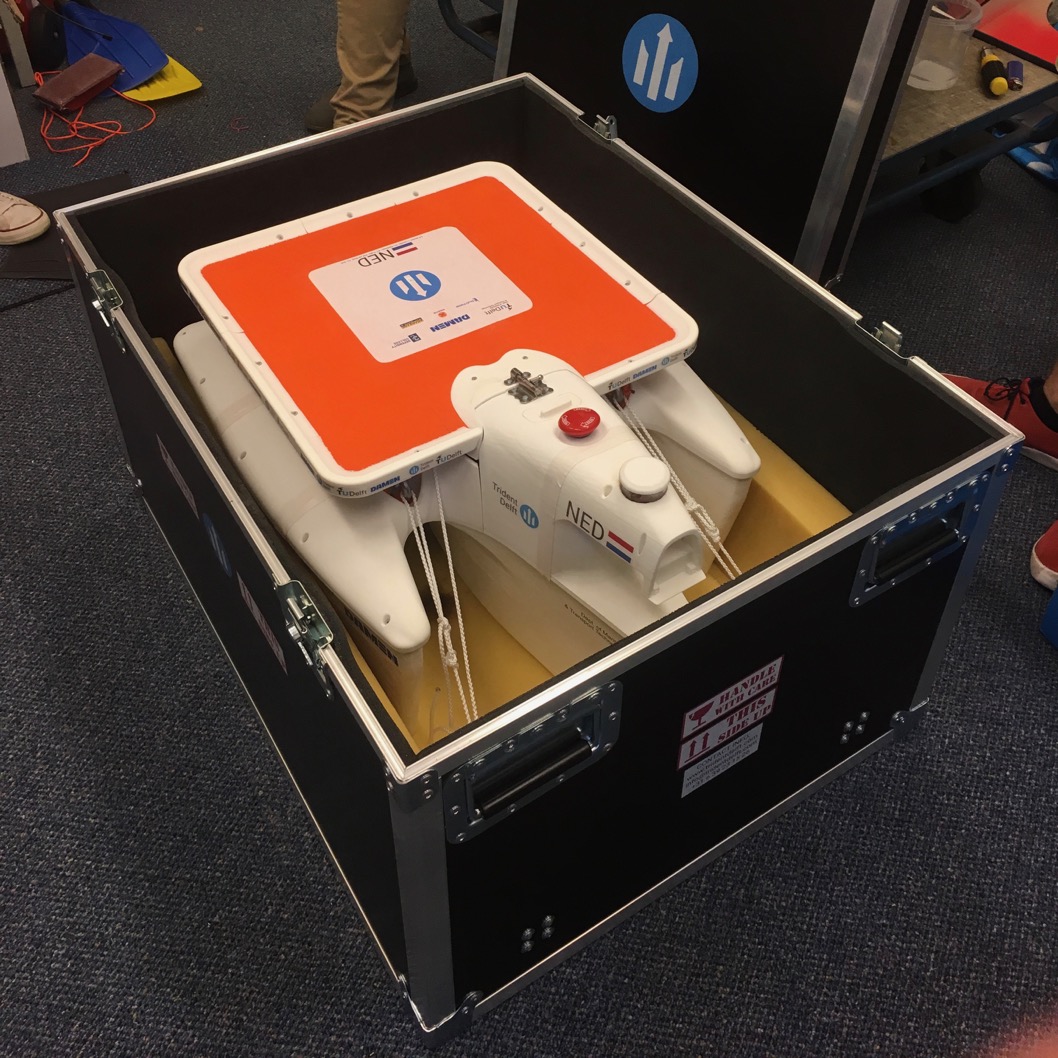
After many long days, nights and weekends we can now proudly present our final design! This is the Trident that we will bring to the 2018 International Roboboat competition. The entire top half of the trident is 3D-printed to millimeter accuracy. This was necessary because pretty much all the components are mounted to the print. These include: the lidar, camera, GPS, harness, our 'suitcase', the hull, the wooden frame, many electrical components, the emergency switch, drone platform and the indication lights. We are now heavily conducting tests to get the Trident fully ready for when we fly out. We can't wait to meet everyone!

3D printing redesigned top half of Trident
We are printing 11 parts that together will form the redesigned top half of the Trident. The 3D printers will be printing for a total of 383 hours!
Buoy detection test
We bought the smallest buoy that will be used during the competition to see if the lidar could detect it. We are using a 2D lidar which means that the visible buoy height must be higher than the distance from the water up to the lidar detection plane. When the boat starts to rock on small waves or because of the wind, the lidar will have a hard time detecting buoys because it will mostly see either the water of the sky. We knew early in the design proces that this is a critical aspect of the boat. We had to design the most stable boat possible and that's why we have built a trimaran. And stable she is!

Article OnzeHaven
OnzeHaven, a Dutch magazine focusing on harbours, wrote a very good article about our project. We talk about the challenges we faced and our design approach. Also, Damen talks about their collaboration with us and the future of autonomous vessels and their use cases. If you ever get the chance to pick up this magazine, you should!

Simulation getting somewhere, sort of...
Simulations are very valuable tools for us. Testing with the boat physically is very time consuming and especially so when we need to tweak variables and values. Doing these kinds of simulations we can speed up the process quite a bit. We do need to get the correct simulation down though :).
Demoday
The demoday was a succes! Everyone was heavily impressed, and most in what we were able to develop and build in just 3 months. We spoke with various news and media channels, professors, companies and very interested high school students who want to pursue their passion in science and engineering.

Preparing for the demoday
On the 18th of January the minor robotics will organise a demoday where various robots from different student teams will be demoed and displayed, including us. Even though at this point in time the official competition regulations aren't available yet, we still have to display a 'finished' boat. This means, for now, we have to paint the vessel, design a top and nose to house the sensors and other various components, apply logo's of the TU Delft, Damen, Xsens, seascape and of course Trident Delft, print a poster, and setup interactive demo's.


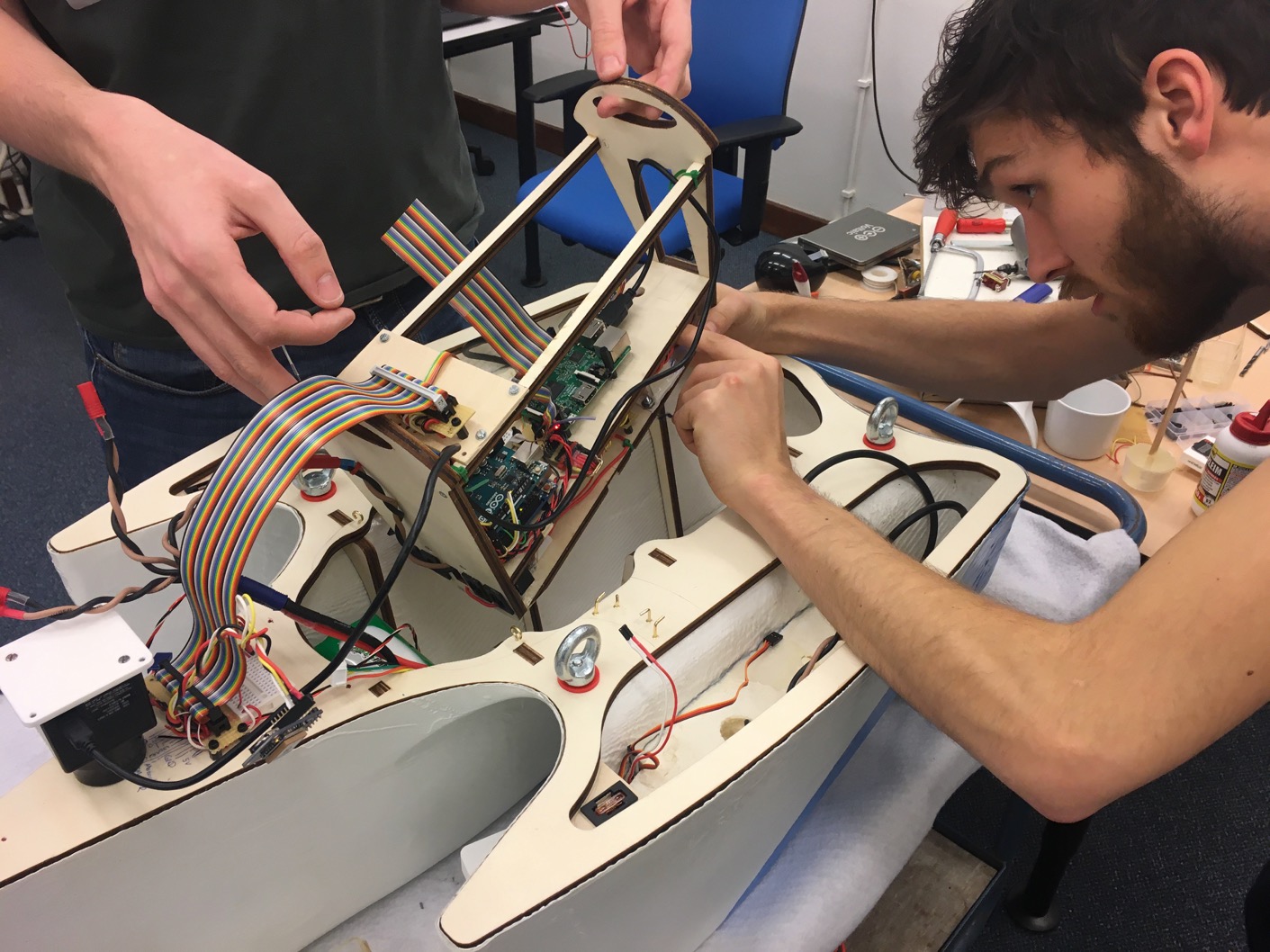
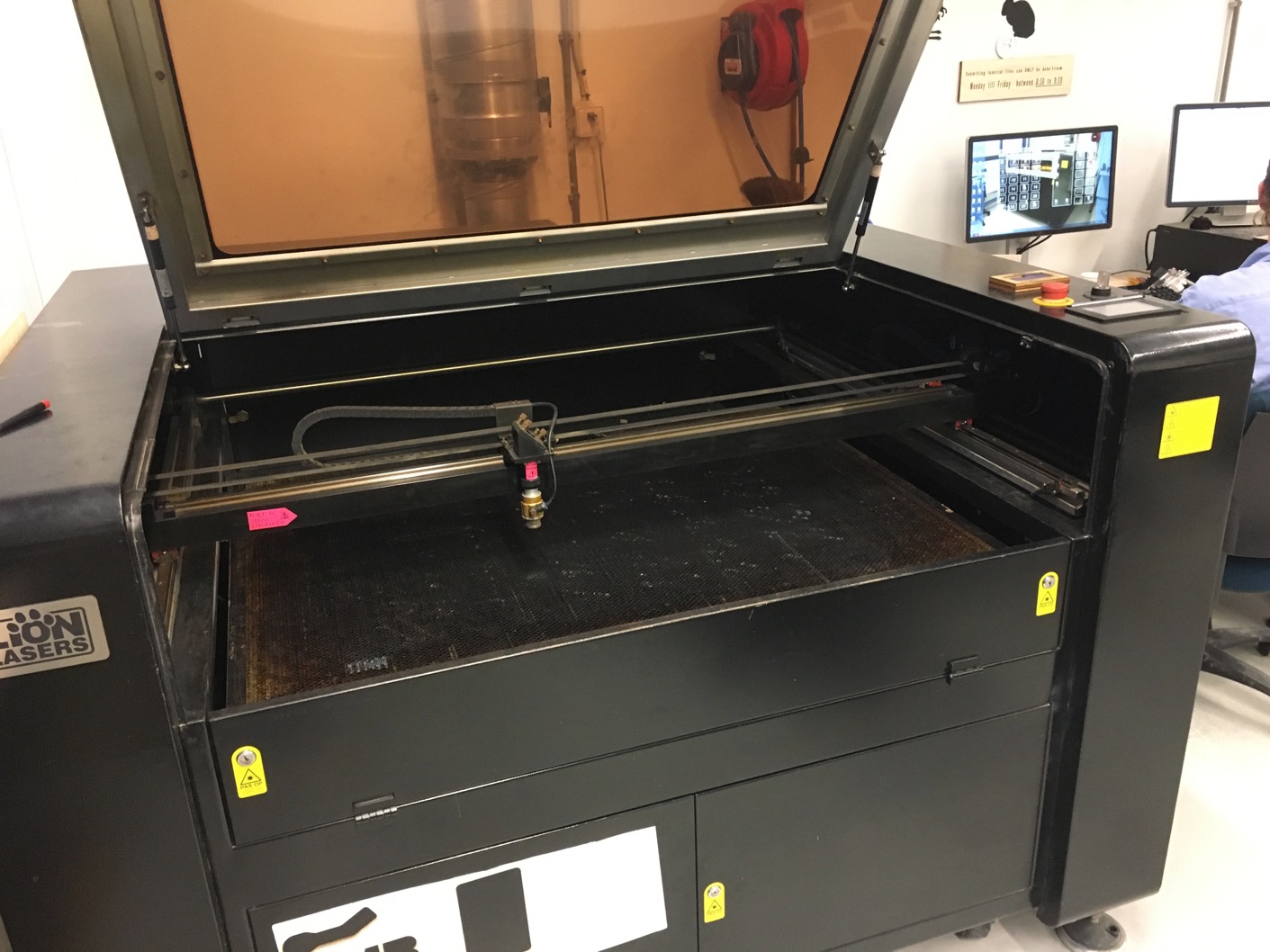
Interior design
Now that the outside hull is almost done, we can start to design the interior. During the design process we took many aspects in consideration: stiffness, strength, ease of use, weight, weight distribution, sensor allocation and mounting points. We are going to use a lasercut process to manufacture the frame. This means cutting out parts out of a 2D 9mm sheet of wood antd turning it into a 3D frame. It was quite fun to design the interior. In the end it is sort of an advanced puzzle you design yourself.


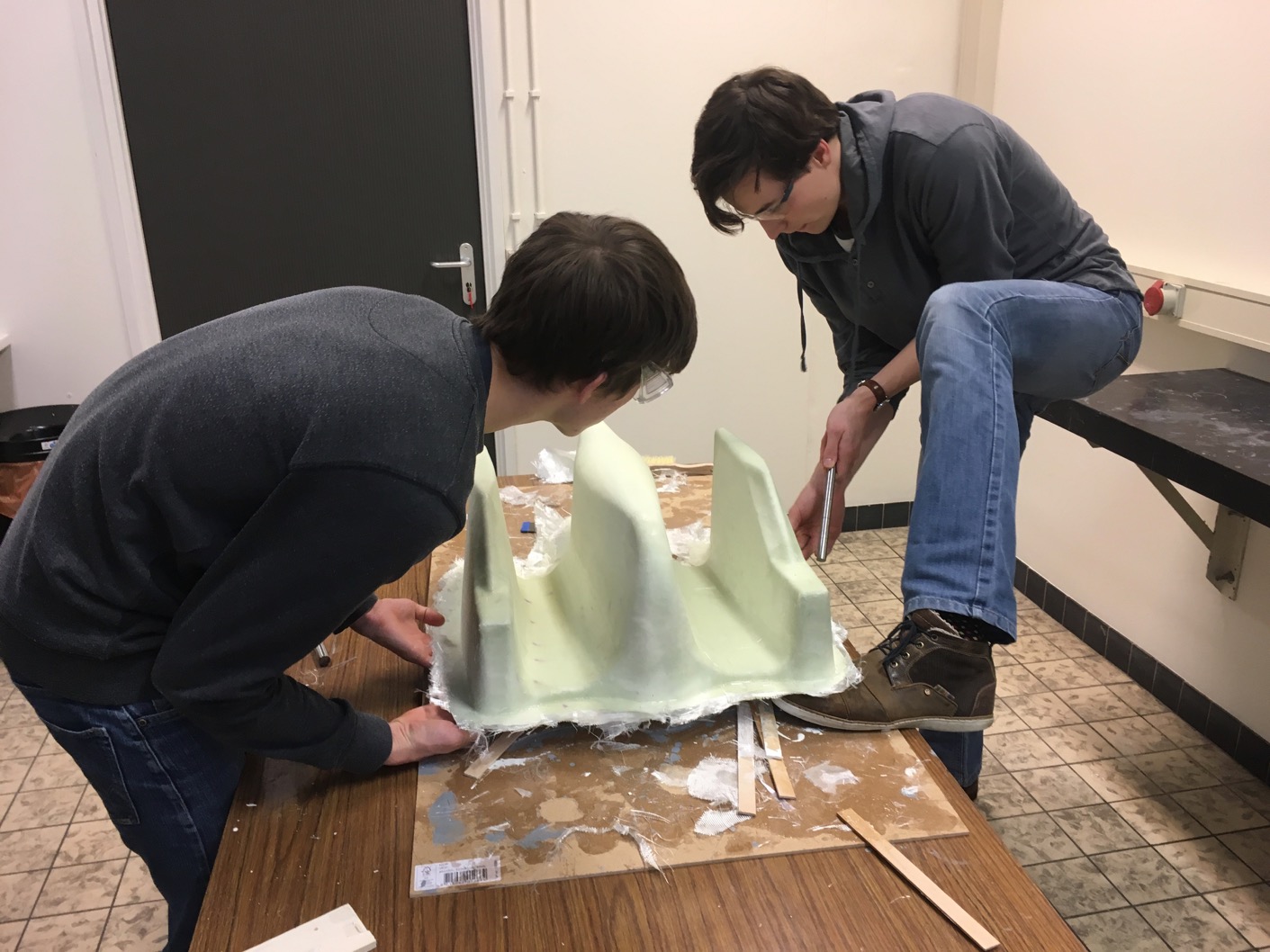
Hull production - step 6
This is the part we have been waiting for. After many days of work finally what once was a model in the computer has become a reality. We knew this was going to be a challenge, especially with our little knowledge of fibreglass, but in the end we think we pulled it off very well. Unwrapping the bleeder and peel-ply was easy, detaching Trident from the wooden board was quite a nightmare. Now we can start mounting motors, computers and sensors to the hull. If everything goes according to plan, we can start to spray a beautiful glossy coat to the outside of the hull.

Hull production - step 5
Done! Now we wait...
Environment mapping
While some are building the boat, the others in the mean time have been busy developing the software. The lidar and IMU on the RC-car (yes car, not boat) sends data wirelessly to the computer where it is translated into a digital environment. It is a lot easier to develop software on a car, but eventually this software will be translated onto the boat.
Hull production - step 4
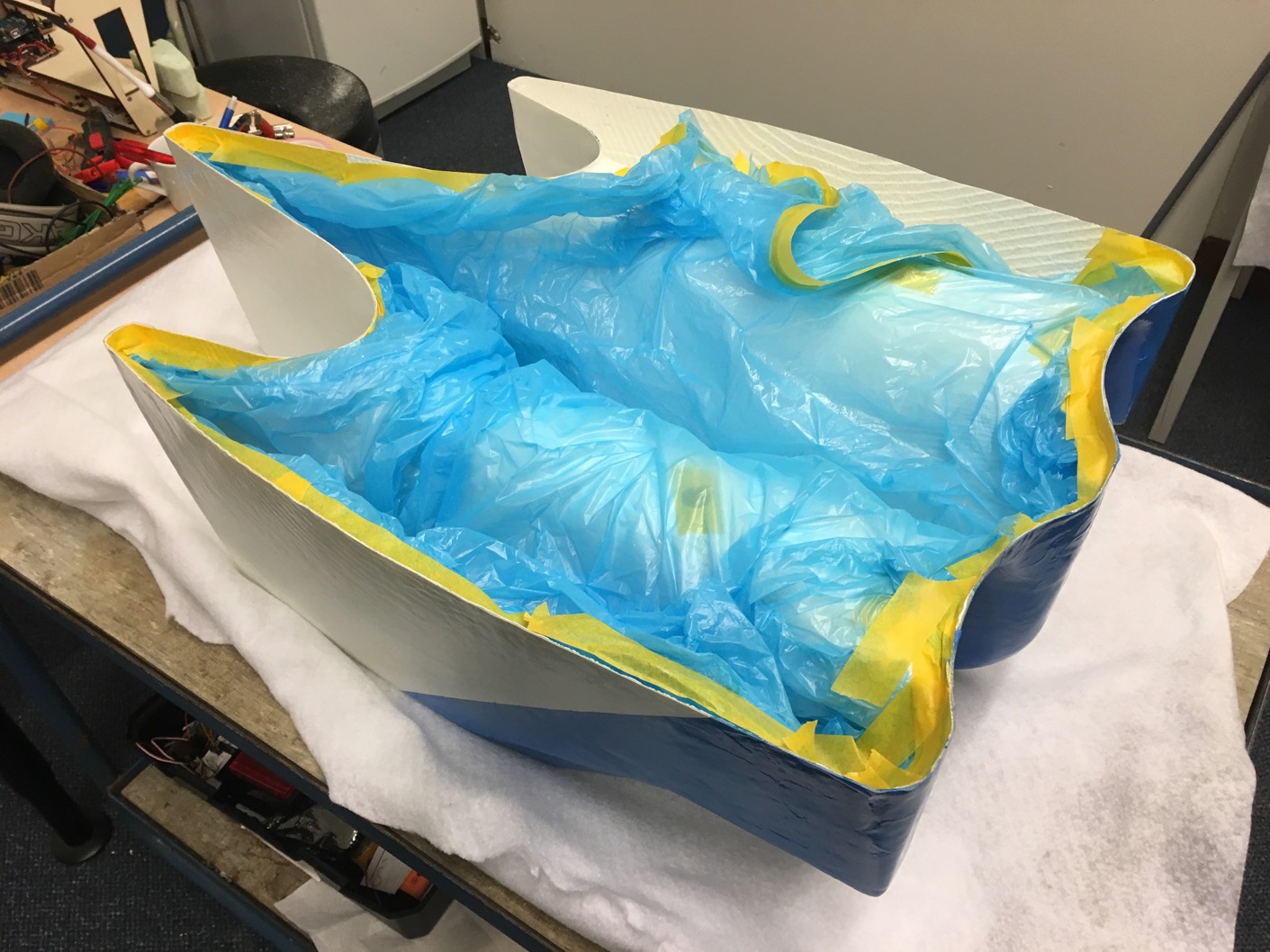
It is time to cut out the custom pieces of fibre glass. A trimaran is a very complex shape and it wasn't easy to cut the correct pieces. Also, woven fibreglass is quite expensive, so every cut must be correct. Note that we are not doing the conventional fibreglass method where first a plug is made and then the layup is done. Making six different moulds, because of this complex shape, takes up too much time. As of right now, the plan is to do the layup directly to the foam mould and finishing off with puddy and top coats.



Hull production - step 3
Now that we have a rough shape of our boat, we can start the fibre glass process. The foam mould is still very porous so first we have to apply a couple of coats to make the surface smoother. Next, we will apply mould release wax and PVA.

Hull production - step 2
Luckily we can make use of a CNC machine to make our positive mould. The entire shape took about 15 hours to cut. Next, we glued them together.
Hull production - step 1
The very first thing to do is buy XPS foam and glue them together. This foam will eventually be our positive mould to apply the glass-fibre to.

Early Christmas
So..... This pile of liquids and cloth is going to be a boat. A lot of work to do. We are armed with brushes!
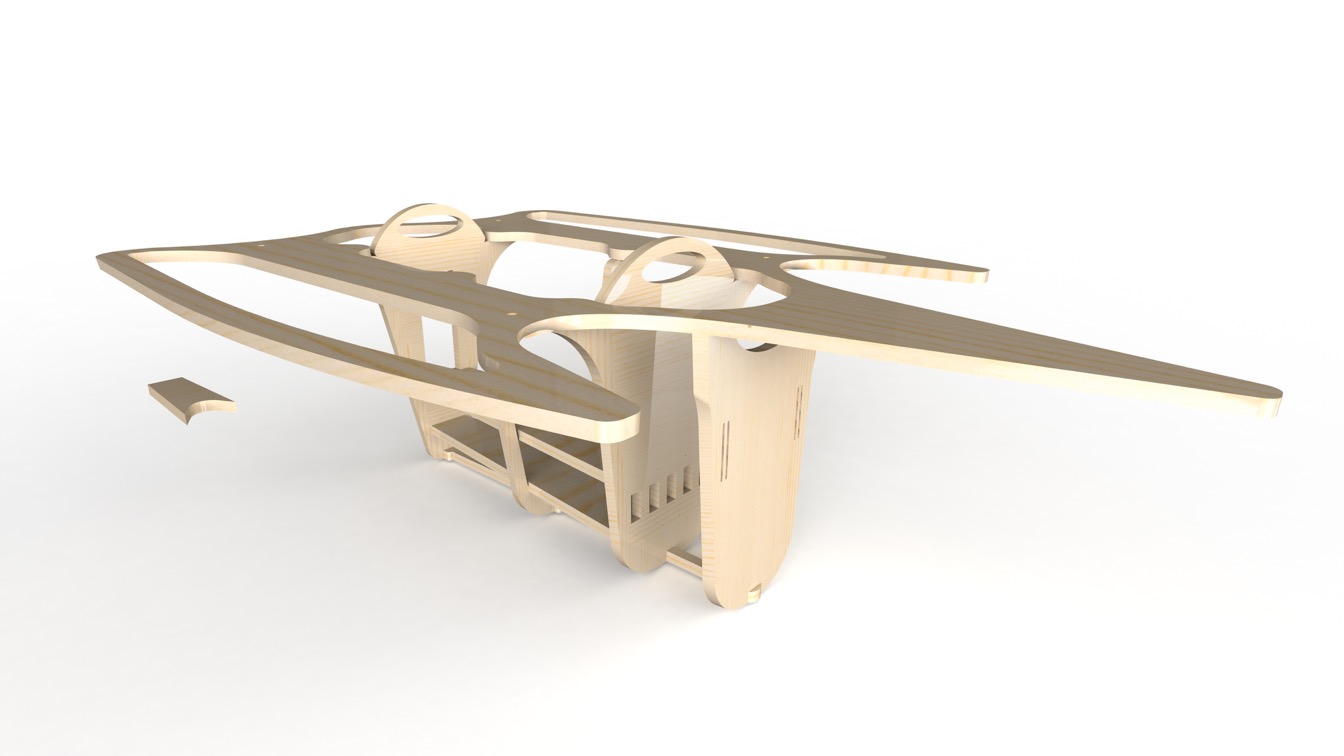
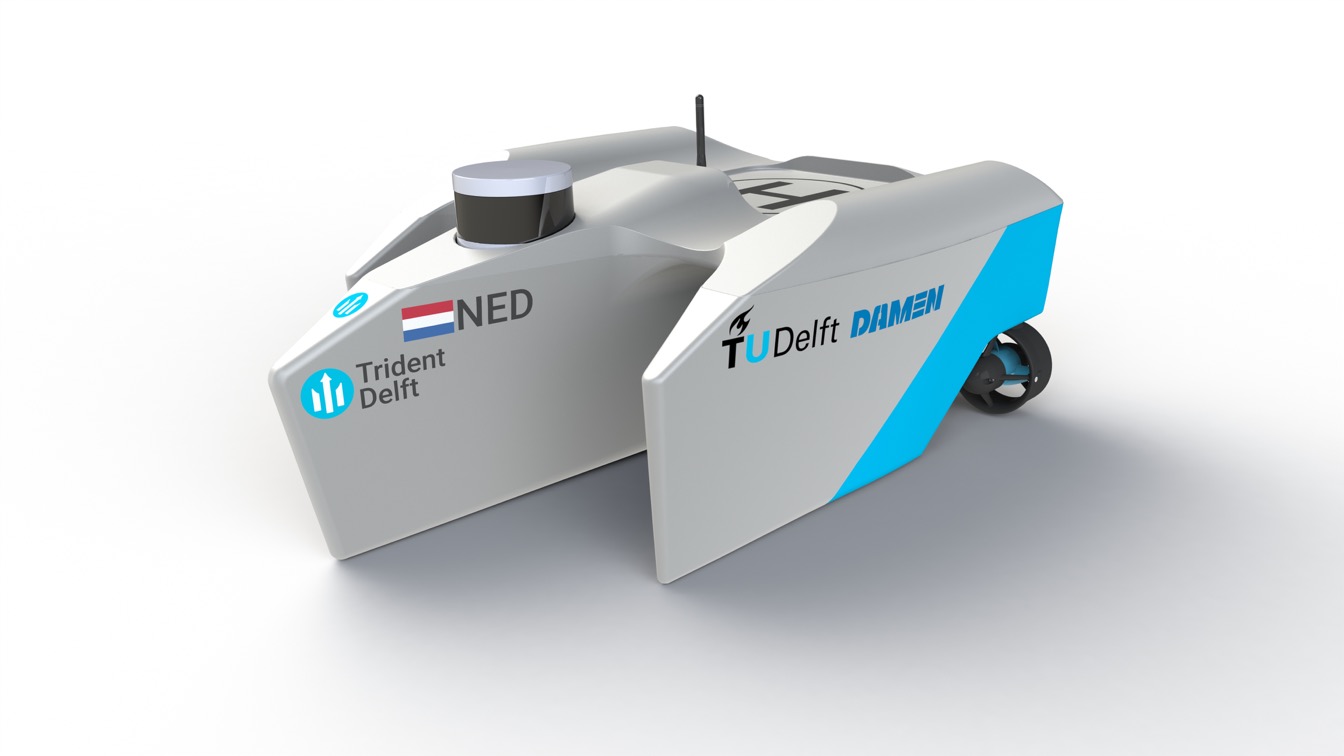
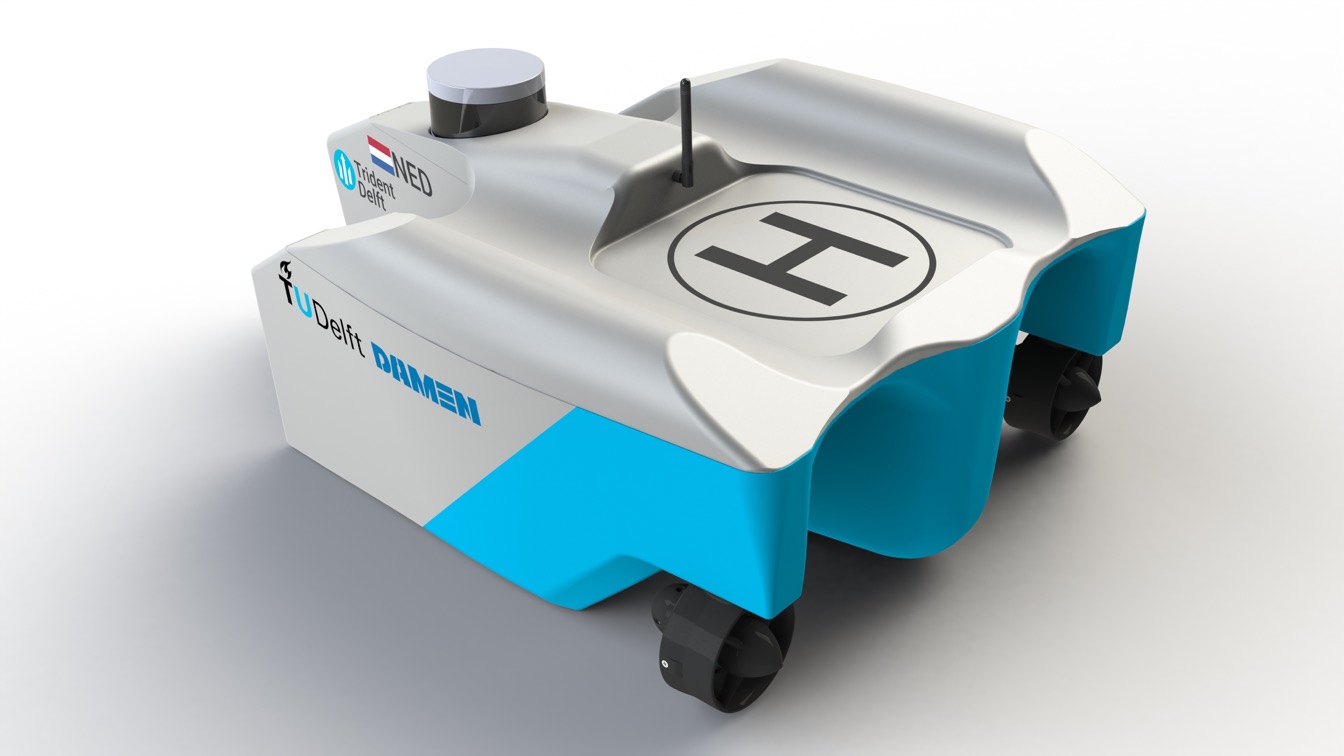
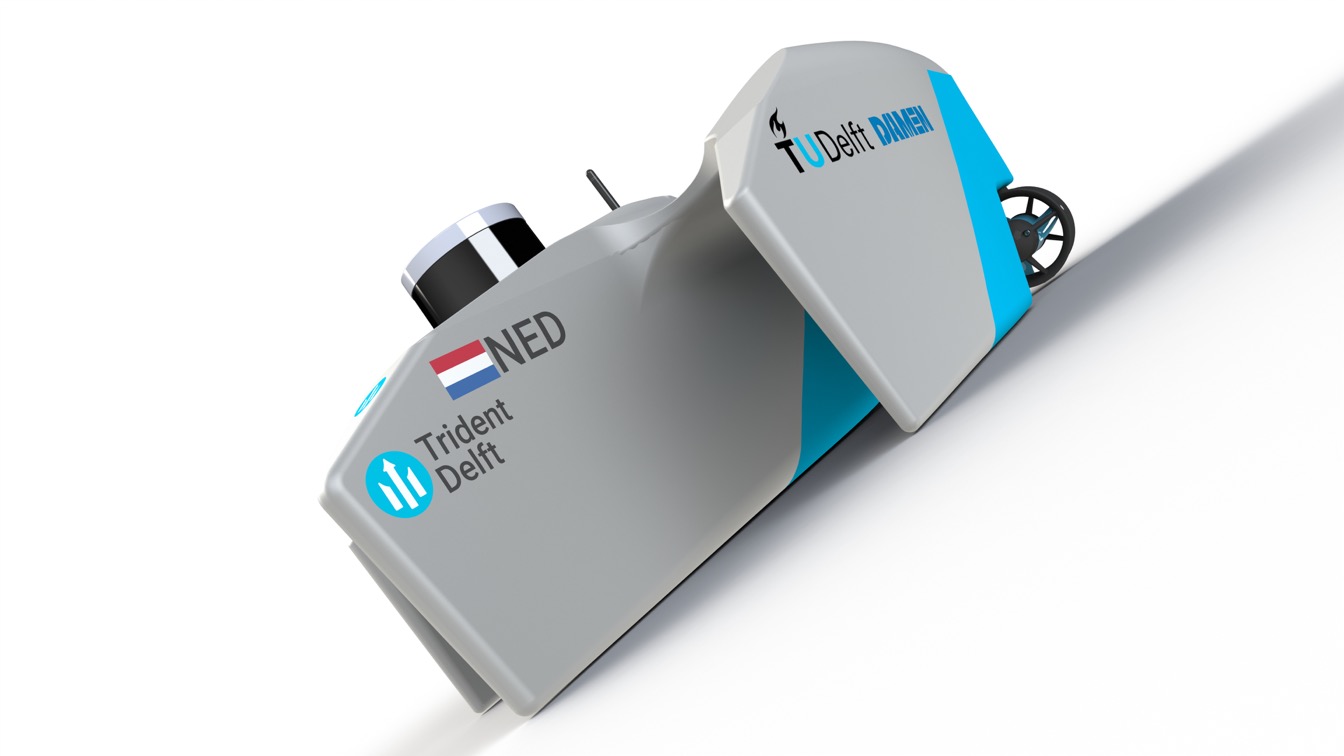
Concept design
The following images are renders after finishing the 'detailed design report' for the minor Robotics. Even though the concept is still subject to small changes as we go along, it will be very similar to these renders. To get a sense of scale, the length of the Trident is 750mm long.
Final logo
After a couple iterations, this is our final logo for Trident Delft.
Prototyping
Building the boat is a giant task, so we wanted to prototype first with a couple of sensors. We borrowed a relatively cheap (sort of) lidar from a robot downstairs and build a small vehicle. The robot didn't have a specific task but it could drive around and avoid obstacles. We displayed our prototype in the faculty of Industrial Design Engineering where there were a couple of middle school classes being shown around. They got very interested and we explained how the robot worked. Even though we are still students, we felt proud to speak to possible future engineers and scientists.

First week
The first week was intense. In order to introduce ourself to the other teams and our faculty supervisors we were given the task of creating a poster displaying our very first concept. We conducted a lot of brainstorming sessions and within a week we had a very clear idea of where we are heading. Exciting!
